

Automaatse sorteerimislahenduse töövoo tutvustus
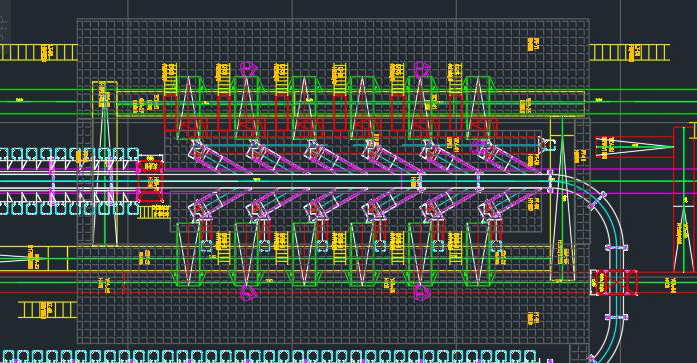
Töövoog
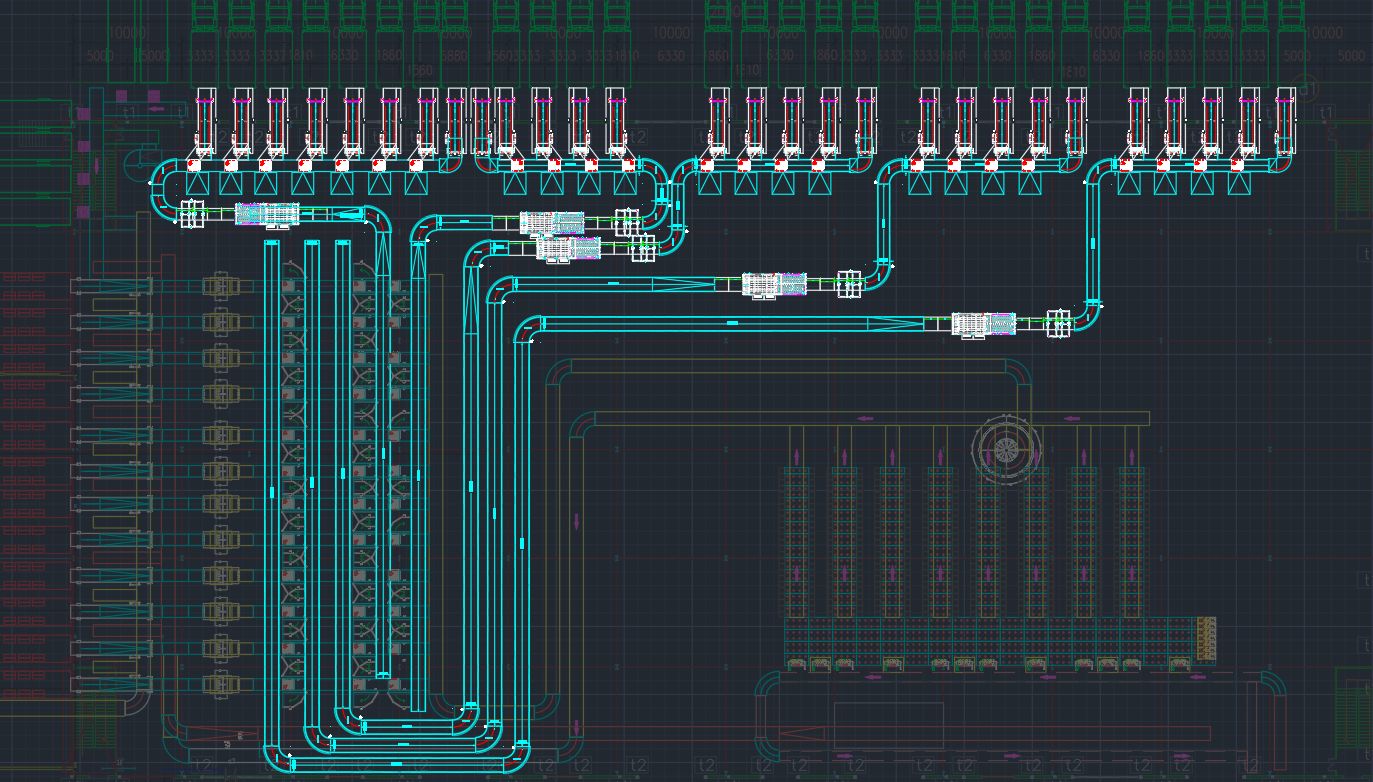
Mahalaadimine Matrix ja Bulky pakkide käitlemine
Suured pakid panevad töölised suuremahulisele pakikonveierile ja transpordivad need teise lattu.
Suure väärtusega pakid panevad töötajad kõrge väärtusega pakikonveierile ja transpordivad need AGV etteandealasse.
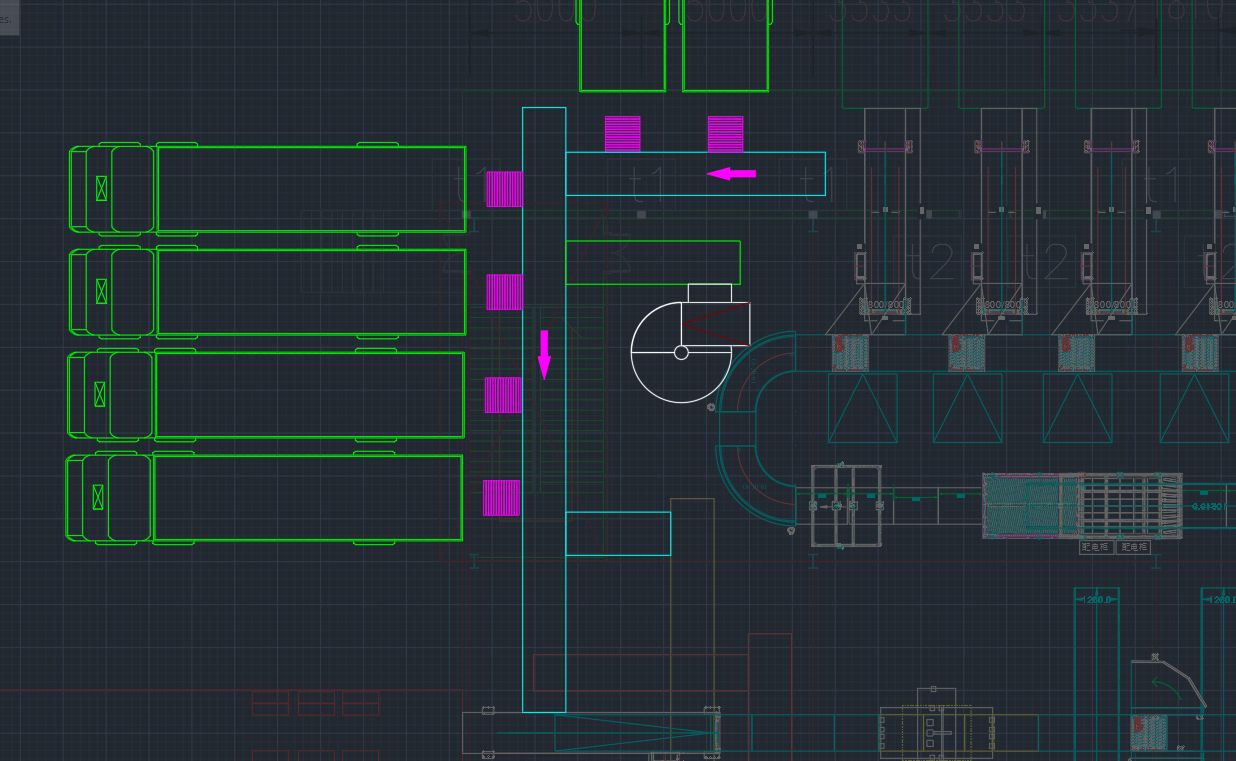
Tippajal saab lasta maha laadida veel 6 veokit.Kaupa saab transportöörile Matrixi põhiliinile panna vaba rullkonveieriga.
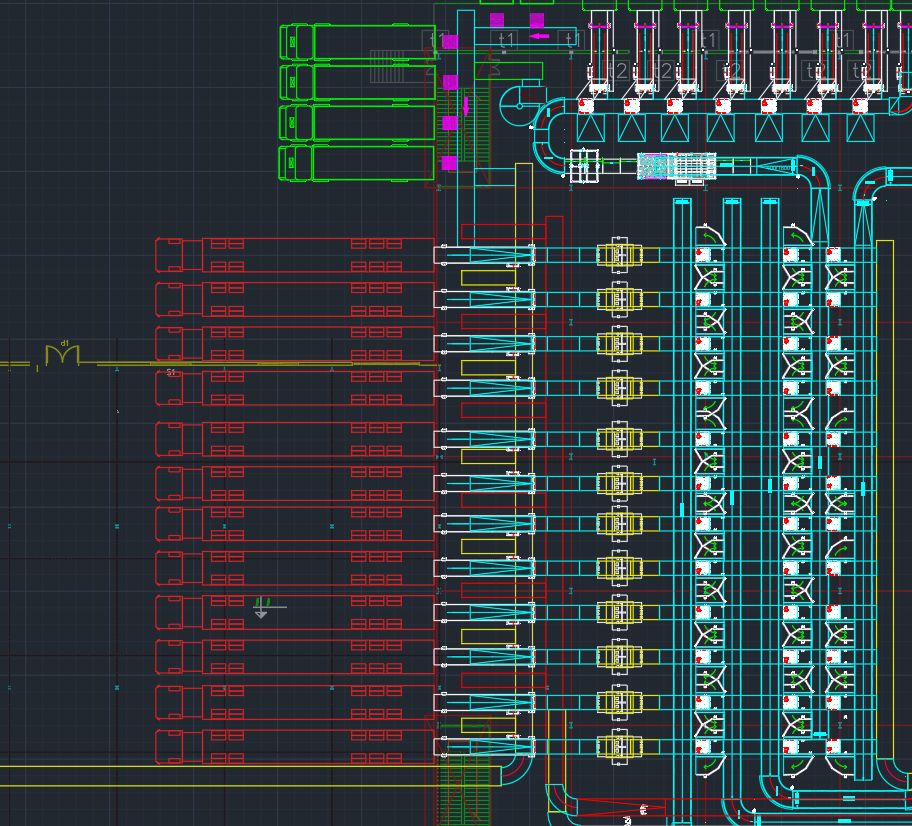
Töötajad laadivad veoautost maha keskmise paki ja relvakotid.Sissetulevale alale tuleb 12 teleskoopkonveierit, 1 käsitsi mahalaadimisliin, 6 suuremahulist pakikonveierit ja 6 suure väärtusega pakikonveierit.
Keskmised maatükid, mille suurus on üle 400 * 400 * 400 mm ja väiksemad kui 1000 * 1000 * 800 mm, saab läbida DWS-i ja sorteerida maatriksi alla ratassorteerija abil.
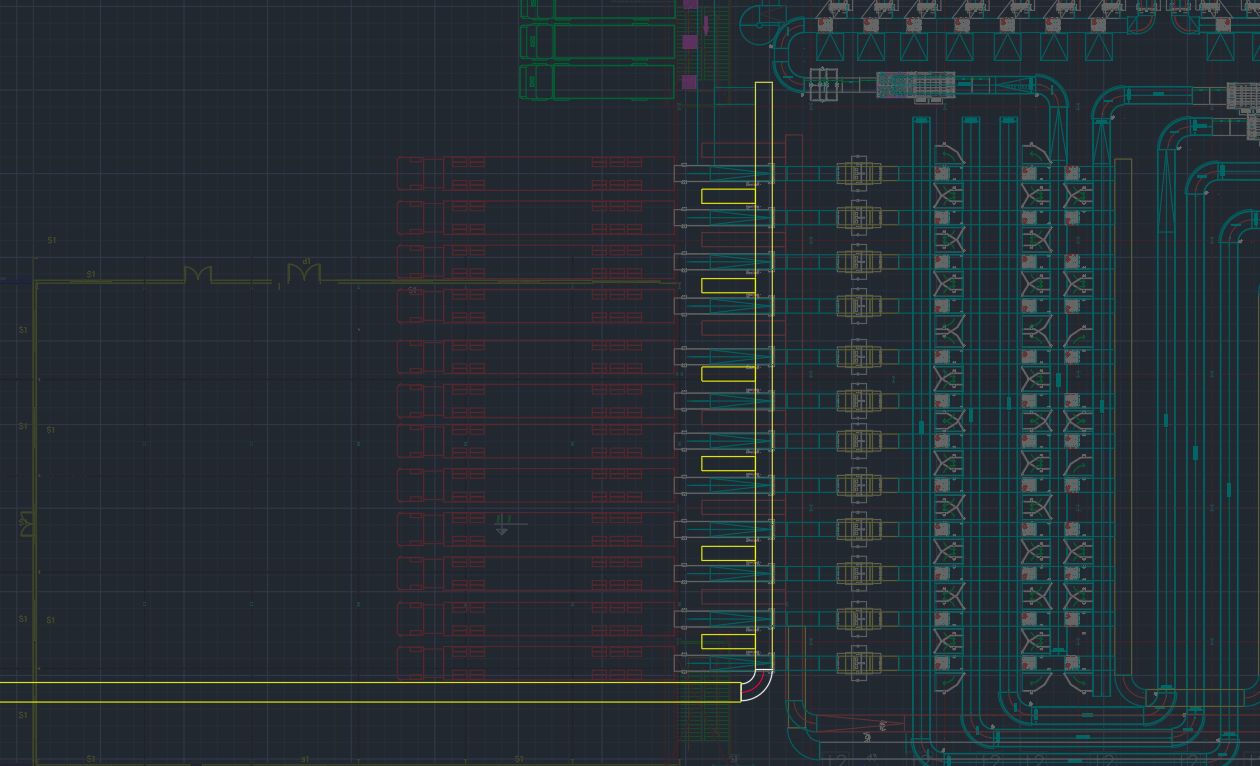
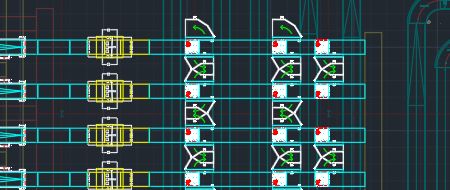
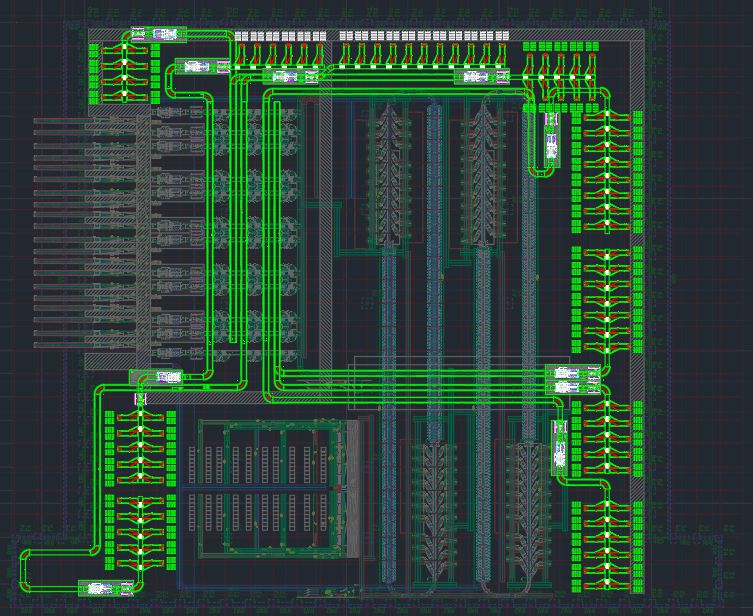
Laadimisala
- Matrix sorteerib pakid 5 erinevasse laadimisalasse.Iga laadimisrida määrab visuaalse singulaatori.Pärast eristamist läbib pakk ükshaaval 6-poolse skanneri.Operaator ei pea vöötkoodi teavet kontrollima.Süsteem sorteerib paki automaatselt õigesse dokki.Visual Sgulatoriga ei pea operaator sihtkohta kontrollima, mis võib vähendada tööjõudu ja suurendada laadimisvõimsust.
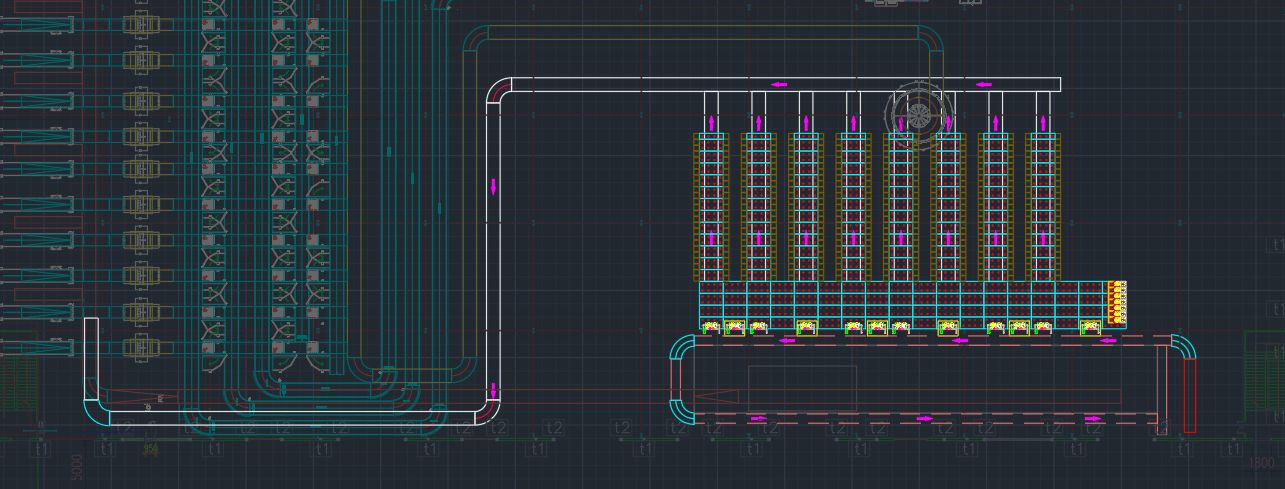
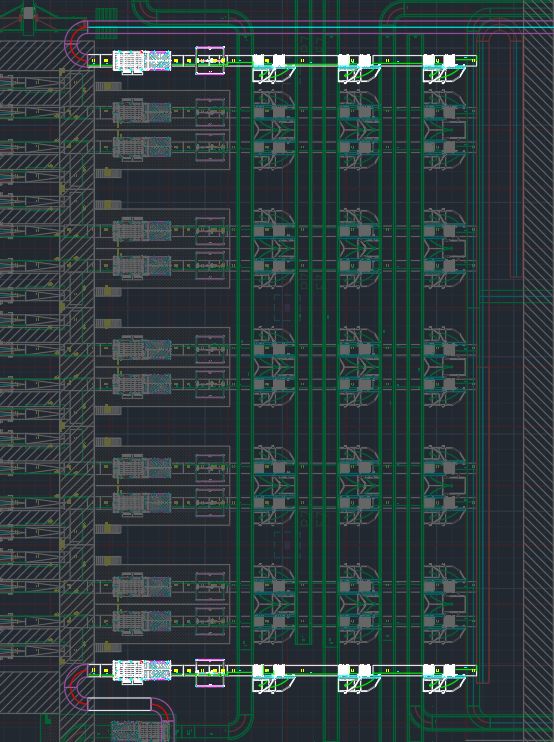
Ebanormaalne pakkide käitlemine ja väike tavaline pakkide käitlemine
Iga induktsiooni lähedal on tagasilükkamisrenn, mis läheb tagasilükkamisliinile.Kui üks pakk ei sobi ristlintsorteerijasse minekuks või teatab süsteemi operaatorile, et see pakk tuleb käsitsi teisaldada, paneb operaator selle paki sisselasketorusse ja kukub konveierile.Seejärel transpordib konveier pakid spiraalrenni kaudu 1. korrusel asuvasse AGV sorteerimisala.
- Seal on ka mõni väikepakk, mis ei saa ristlintsorteerijale minna, kõik need transporditakse AGV sorteerimisalasse prügiliini pidi.
- AGV sorteerimisala sorteerib tagasilükatud pakid ja kõrge väärtusega pakid.Seejärel transporditakse need pakid Matrixi DWS-i, et minna väljaminekule.
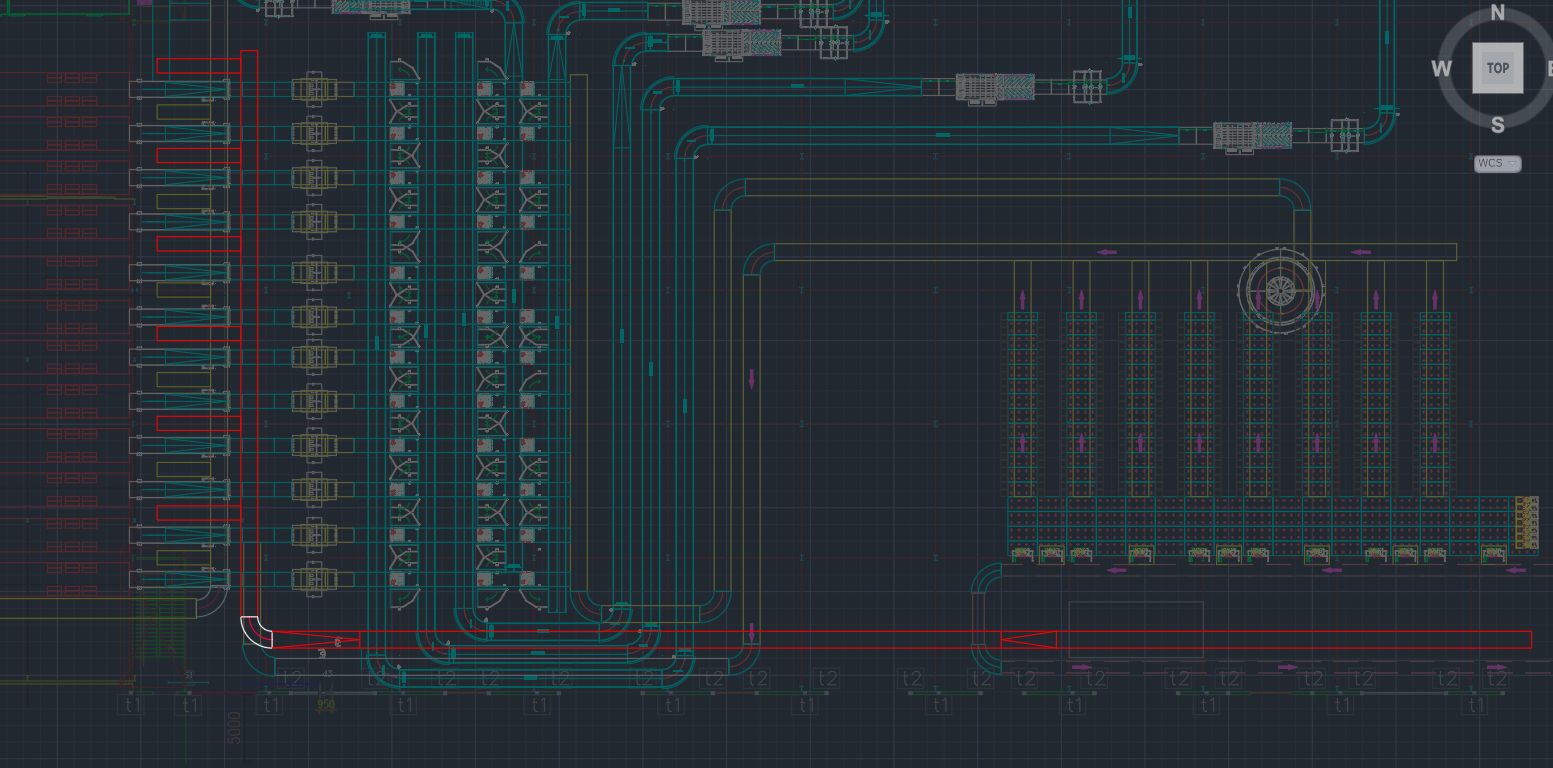
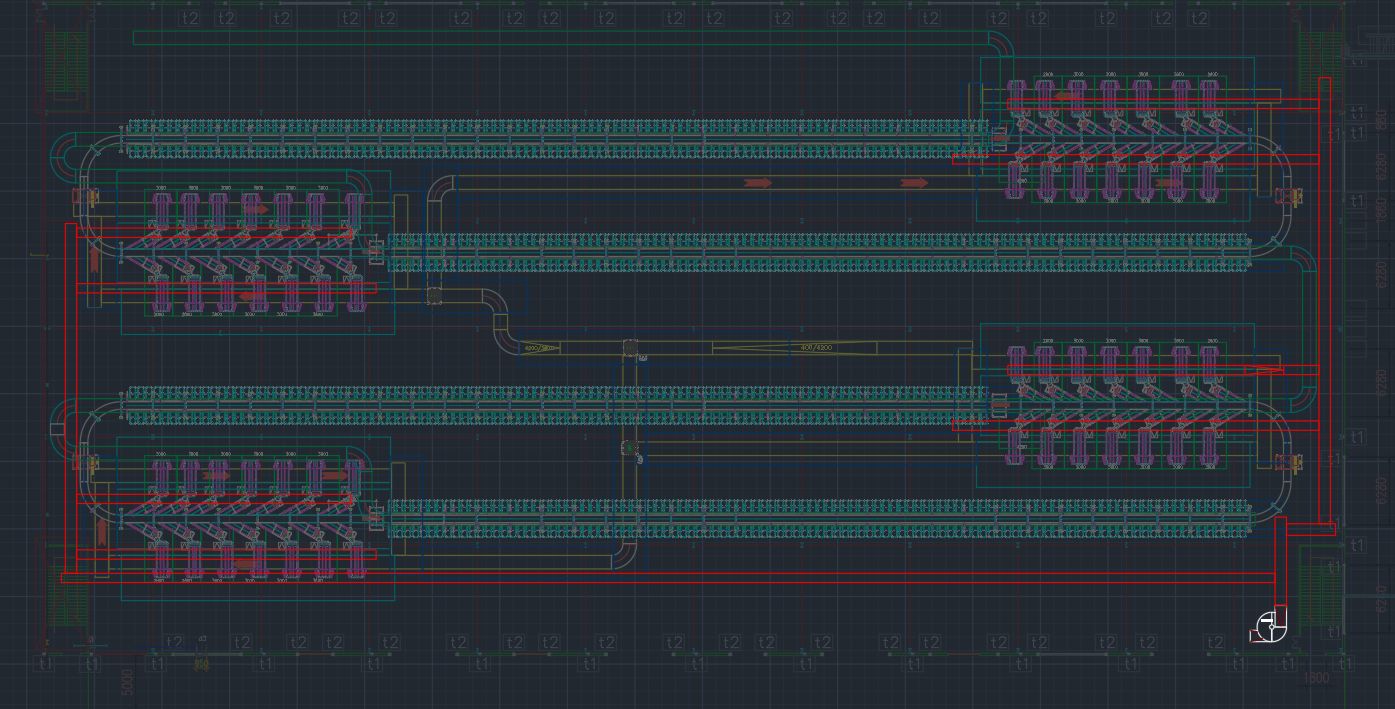
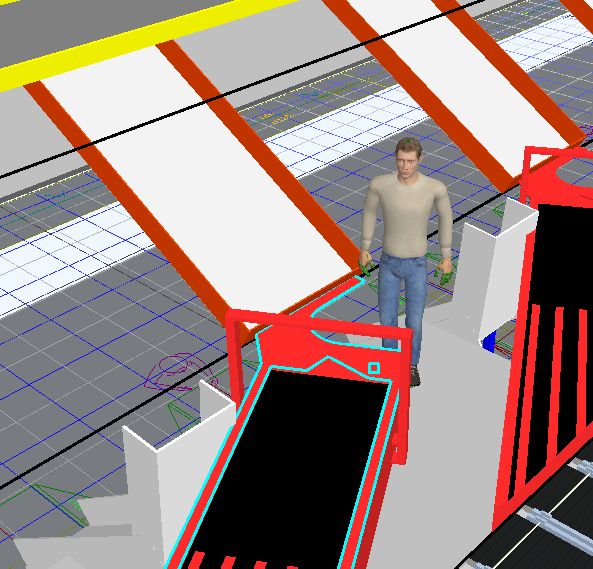
Väikepakkide sorteerimine sissejuhatamisel
- Operaatorid pakivad koti lahti ja viskavad pakid rennidesse.
- Tippajal on lahtipakkitud alal ka teine funktsioon.Poolkorrusel on piisavalt ruumi relvakottide hoidmiseks.
- Iga induktsioon koosneb vöötkoodiskannerist, kaaluanduritest, mõõtmeanduritest, pihuskannerist ning arvutist koos klaviatuuri ja hiirega.
- Operaatorid võtavad pakid rennist ja panevad need ükshaaval Induktsioonile.
- Induktsioon skannib, mõõdab ja kaalub paki automaatselt.Pärast seda liidetakse pakid Risti vööaasaga.
- Kui automaatskanner ei suuda vöötkoodi lugeda, peatub see pakk seal ega liideta sorteerijaga.Et operaatorid saaksid skannimiseks kasutada pihuskannerit või vöötkoodi numbri käsitsi arvutisse sisestada.
- Iga induktsiooni lähedal on tagasilükkamisrenn, mis läheb esimesel korrusel.Kui üks pakk ei sobi sorteerijasse minekuks või süsteem teatab operaatoritele, et see pakk tuleb käsitsi teisaldada, panevad operaatorid selle paki tagasilükkamisrenni, mis ühendub ebanormaalse pakiliiniga.See liin transpordib ebatavalised pakid käsitsi sorteerimisalale.
Tagastusliini transport ja sorteerimine
- Pärast ristlindi sorteerimist ja käsitsi sorteerimist võtavad töötajad relvakoti maha ja pakivad selle ning asetavad relvakoti tagasivooluliinile, mis on ristvöö all.Püssikotid transporditakse tagasi Matrixisse ning sellel on Visual Sgulator ja 6-poolne sorteerimismasin, mis sorteerib relvakotid laadimisliinidele.
Ristvöö Paki spetsifikatsioon
Automatiseeritud sorteerimissüsteem on võimeline käsitlema pappkaste, kottidesse pakitud esemeid ja pakiümbrikke.Üldiselt transporditakse ja sorteeritakse selles süsteemis kõige rohkem tooteid:

Edasikantavad pakid
Pakke ja pappkaste saab käsitleda automatiseeritud sorteerimissüsteemiga.Ulatuslike katsetuste ja kogemuste analüüsi põhjal on Dijie tõestanud, et suudab käsitseda polükotte, lamedaid pakke ja ümbrikke.
Soovitatavad mõõtmete spetsifikatsioonid on järgmised:
| Mõõtmed | [Ettevõte] (P × P × K) | Spetsifikatsioon GF (P × L × K) |
| Maksimaalne suurus [mm] | 400×400×400 | 400×400×400 |
| Minimaalne suurus [mm] | 85×85×10 | 85×85×10 |
| Kaaluvahemik [kg] | 0,05-10 | 0,05-20 |



















